¿Cómo funciona la función de evitación de obstáculos del Xiaomi Robot Vacuum S20+?
*Esta página ha sido traducida automáticamente del íngles.
A continuación se muestran las formas de funcionamiento de
lafunción de evitación de obstáculos
:
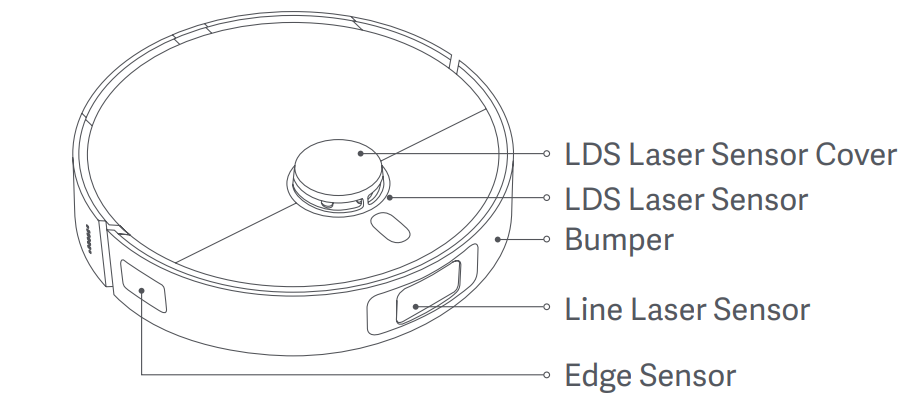
1. Se instala un sensor láser de línea frente a la aspiradora del robot, que puede detectar varios obstáculos en el suelo, medir la distancia y planificar de forma autónoma reducir la velocidad con anticipación para evitar colisiones;
2. Se instala un sensor de borde en el frente lateral, que mide la distancia desde el borde, reduce la colisión y es más eficiente;
3. El parachoques puede proteger eficazmente el robot aspirador;
4. El sensor láser LDS puede medir la altura del obstáculo frente y determinar si es accesible debajo de la cama o el sofá.
Las ubicaciones de los sensores se muestran en la siguiente imagen:
1. Se instala un sensor láser de línea frente a la aspiradora del robot, que puede detectar varios obstáculos en el suelo, medir la distancia y planificar de forma autónoma reducir la velocidad con anticipación para evitar colisiones;
2. Se instala un sensor de borde en el frente lateral, que mide la distancia desde el borde, reduce la colisión y es más eficiente;
3. El parachoques puede proteger eficazmente el robot aspirador;
4. El sensor láser LDS puede medir la altura del obstáculo frente y determinar si es accesible debajo de la cama o el sofá.
Las ubicaciones de los sensores se muestran en la siguiente imagen:
¿Te sirve de ayuda?
Sí
No