 小米商城APP
小米商城APP










































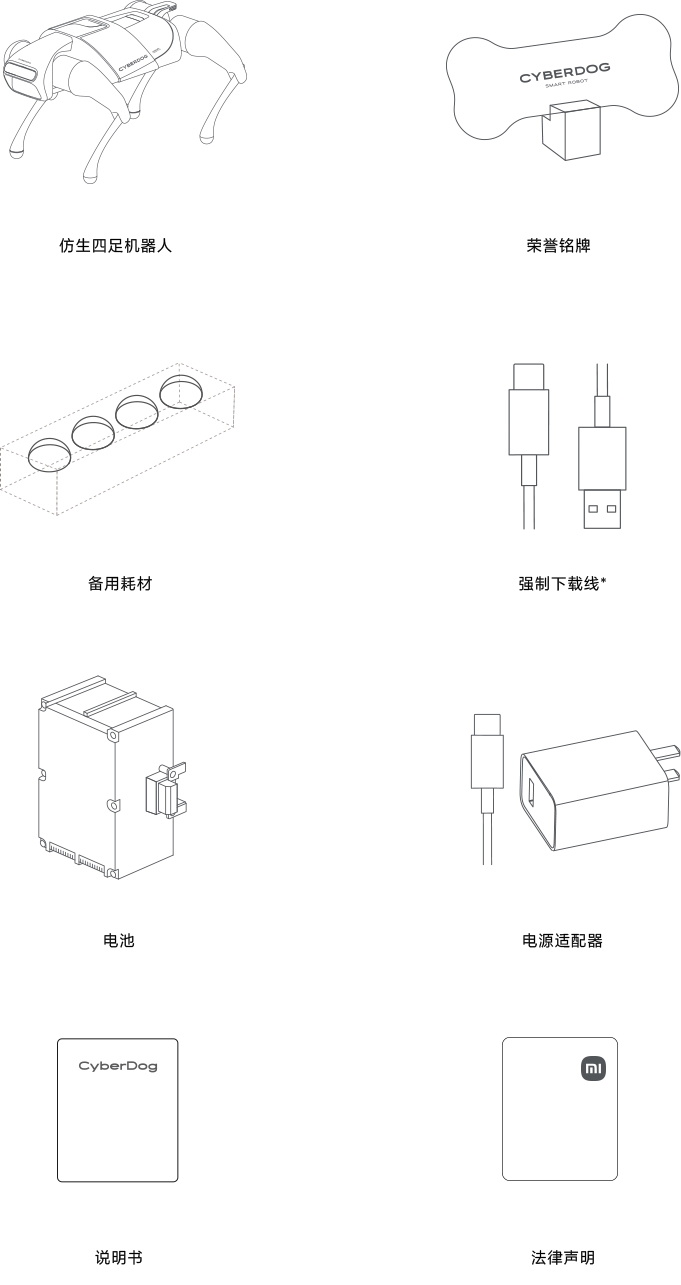
- 产品名称:CyberDog 仿生四足机器人
- 产品型号:21051191C
- 站立:
长度:771mm
宽度:355mm
高度:400mm趴下:长度:807mm
宽度:406mm
高度:206mm - 整机重量(含电池):14kg
- 自由度:整机12,单腿3
*此数据为小米实验室测试数据,依据行业内测量方式不同,实际结果可能略有差异

长度:771mm
宽度:355mm
高度:400mm
长度:807mm
宽度:406mm
高度:206mm
*此数据为小米实验室测试数据,依据行业内测量方式不同,实际结果可能略有差异
*实验室测得整机最大行走速度为3.2m/s,最大安全行走速度为1.6m/s
*以上电机信息为单电机模组在实验室环境测得
*自主定位是指室内依据SLAM技术的定位
GB31241
UN38.3
*以上数据来自第三方独立实验室或小米实验室,受限于实验条件,实验结果与实际使用可能略有不同
*1小时是包括趴下、起立、静止姿态展示、常规地面稳定行走等基础行为综合测得
GB 17625.1-2012
GB 4943.1-2011
GB/T 9254-2008
*仅用于CyberDog强制下载固件使用,勿作他用
小米商城 | 小米澎湃OS | 米家 | 多看 | 游戏 | 音乐 | 政企服务 | 小米天猫店 | 小米集团隐私政策 | 小米公司儿童信息保护规则 | 小米商城隐私政策 | 小米商城用户协议 | 问题反馈 | Select Location
北京互联网法院法律服务工作站 | 中国消费者协会 | 北京市消费者协会
©
mi.com 京ICP证110507号
京ICP备10046444号 京公网安备11010802020134号 京网文[2023]0169-004号
(京)网械平台备字(2018)第00005号 药品医疗器械网络信息服务备案 (京)网药械信息备字(2024)第00478号 营业执照 医疗器械质量公告
增值电信业务经营许可证编号:京B2-20180851 网络食品经营备案 京食药网食备202010048
食品经营许可证 新出发京批字第直220280号
违法和不良信息举报电话:171-5104-4404 知识产权侵权投诉 本网站所列数据,除特殊说明,所有数据均出自我司实验室测试



